I recently graduated from UIUC and am now continuing to pursue robotics research as a PhD
student in Mechanical
Engineering at Columbia University. My passion is controlling robot movement, with current interests
in both classical control systems and data-driven approaches.
Undergraduate Research: Soft Robotic Actuators
In my undergraduate research lab, I worked on a robotic octopus arm, constructed by
conjoining three silicone rubber tubes each with fibers wound at a particular angle. I can control
the arm's movements by adjusting the pressure within these tubes, allowing it to be positioned in
any desired pose.
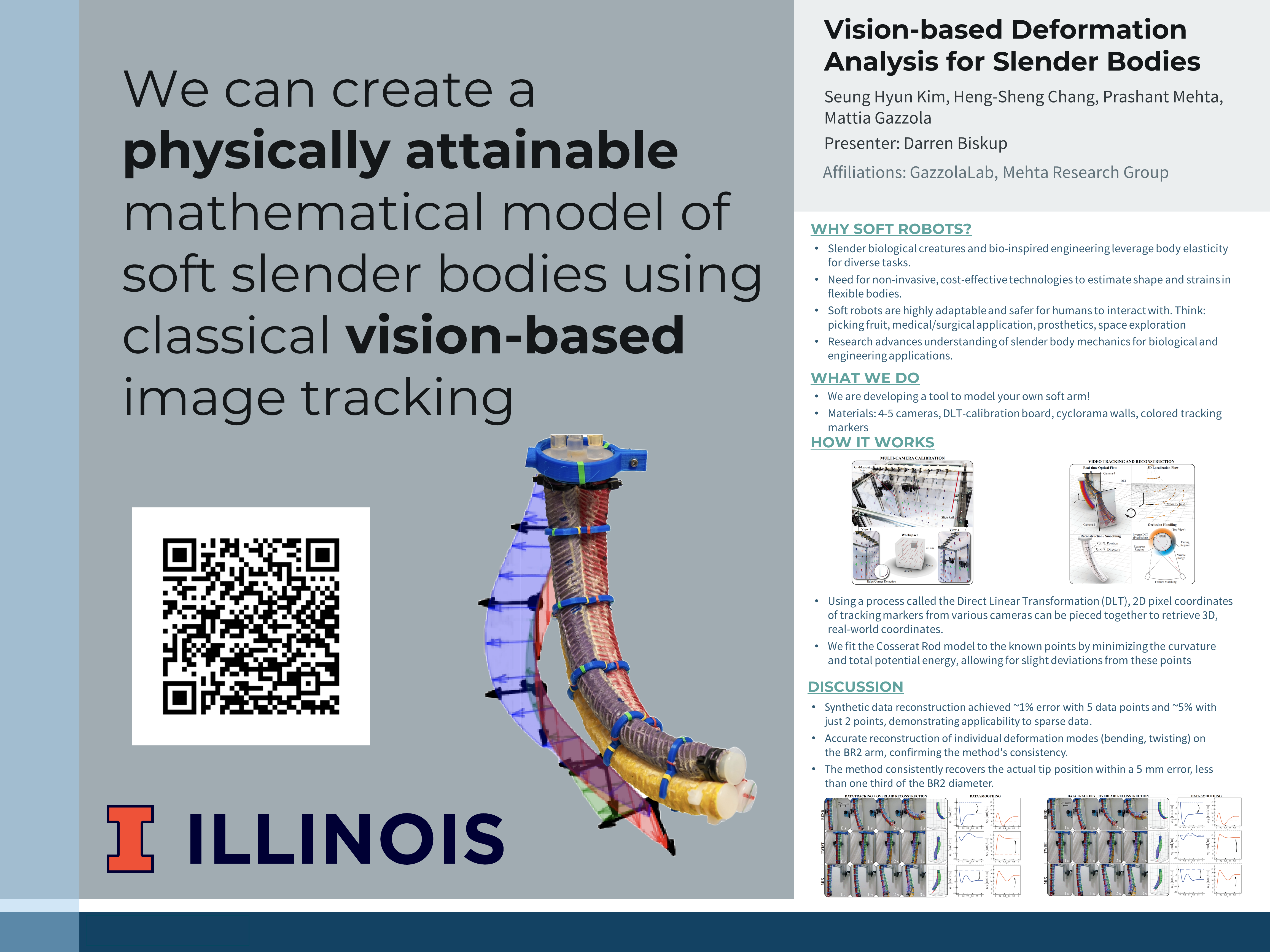
The group's objective is to create a mathematical model of the robotic octopus arm, which can then be
used to predict the arm's pose based on a new set of input pressures. To record the
arm's movements, we use 4-5 RGB cameras to capture its motion from tracking markers attached along its length. A computer vision script extracts
the 2D pixel coordinates of the tracking markers, then applies a coordinate transformation using calibrated camera parameters to convert these coordinates into real-world 3D positions.
As part of the camera calibration, we move a precise grid of known dimensions
within the experiment workspace, allowing the cameras to capture a dense 3D grid. I laser-cut a clear acrylic board and applied green acrylic paint to create the grid.
Then using OpenCV and scikit-image a script I wrote isolates and retrieves the centroids (in pixel
coordinates) of the green dots.
I extended the arm control script to incorporate joystick input and mapped these inputs to the
desired pressure adjustments for the silicone rubber tubes in the arm. This integration provides a
more intuitive and flexible means of controlling the robotic arm but also demonstrates possibilities
for teleoperation and interactive applications in various research scenarios.
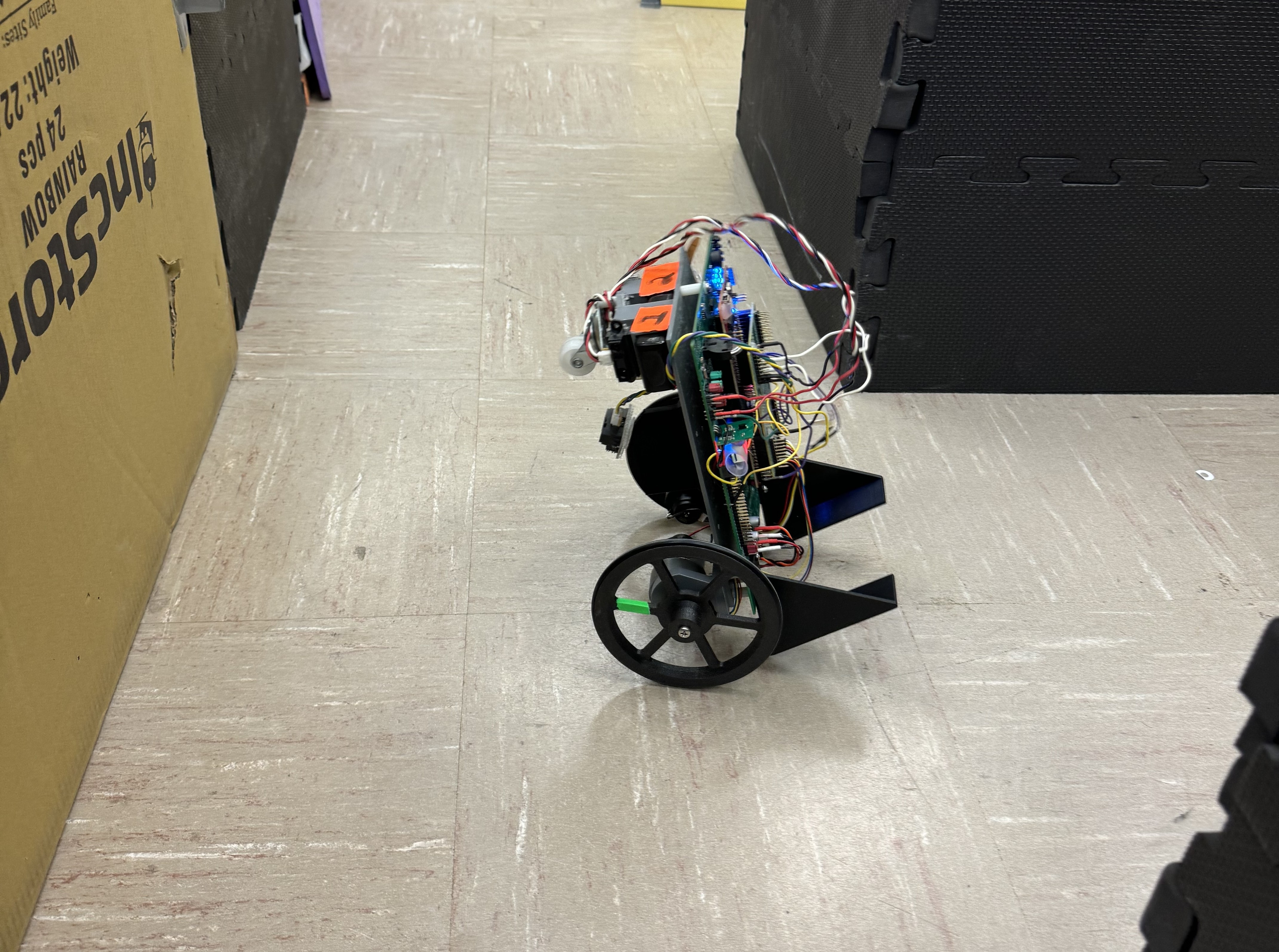
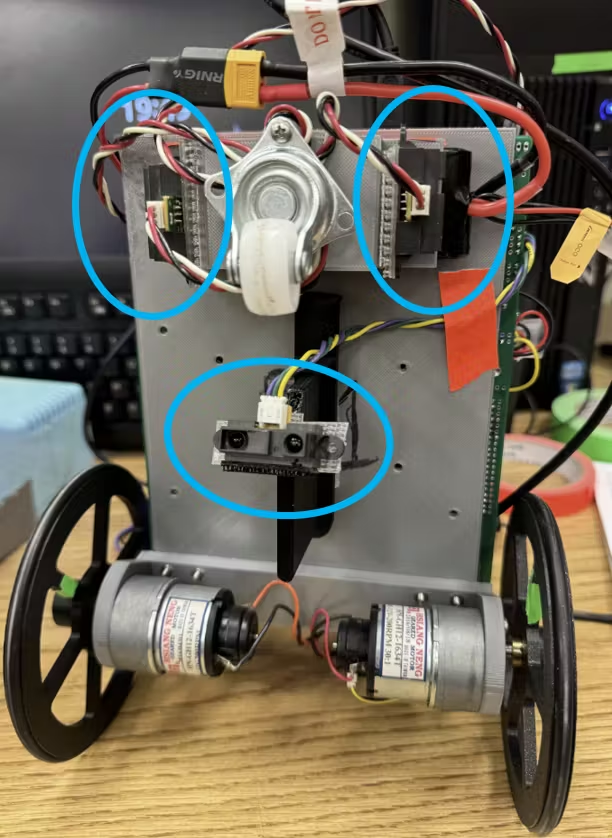
Maze-Solving Segbot
For my Computer-Controlled Mechanical Systems course, my team of four developed a maze-solving robot
using the Texas Instruments F28379D LaunchPad board as a capstone project.
The robot balances on two wheels and procedurally navigates mazes constructed from foam walls,
guided only by 3 IR sensors. It
uses an MPU-9250 IMU for acceleration and gyroscope data and rotary encoder feedback from the DC
drive motors to maintain balance throughout its pathing.
The robot operates in three distinct movement modes: maze traversal mode, turning mode, and linear
move mode. In maze traversal mode, it slowly moves forward while using PI control on the left and
right IR sensor inputs to center itself between the walls. In turning mode, forward motion is
suppressed and only rotation is allowed. In linear move mode, turning is suppressed to allow
straight line motions.
A higher level pathing planner uses a depth-first recursive algorithm to solve the
mazes. It uses the linear move and stationary turns to center iself at detected junctions and
systematically explores down each available path,
starting with the leftmost branch. If the left branch reaches a dead-end or has been fully searched,
the robot returns to the junction, reorients forward, and proceeds down the next unexplored path.
This continues until sensing no walls on all 3 IR sensors, indicating the goal is reached.
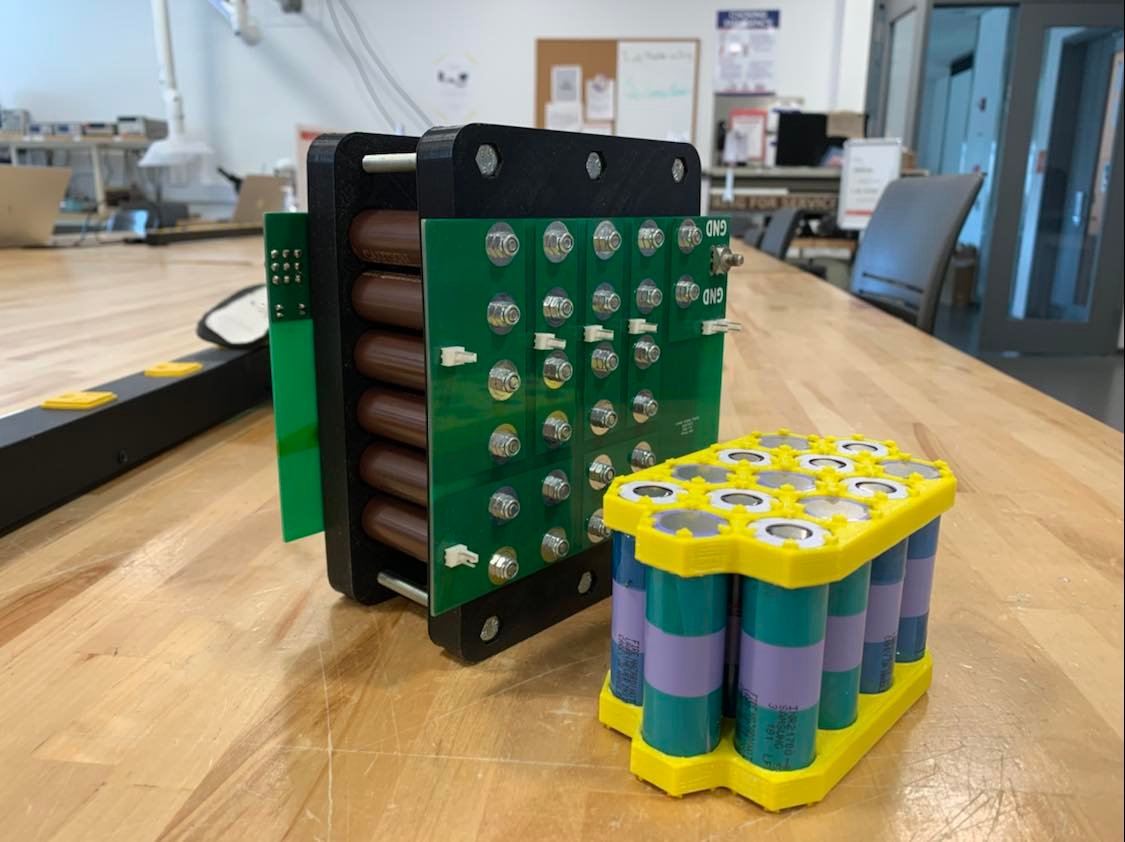
Eco Illini Supermileage: G5e Battery Pack
I created a brand new battery pack for the G5e prototype vehicle of Eco Illini
Supermileage, a Registered Student Organization at UIUC. Each year the club competes in
the
Shell Eco Marathon to achieve the most efficient prototype car.
The updated pack (right) is visibly smaller than the previous generation (left), yet exhibits 25%
less weight despite its 33.3% greater volumetric energy density.
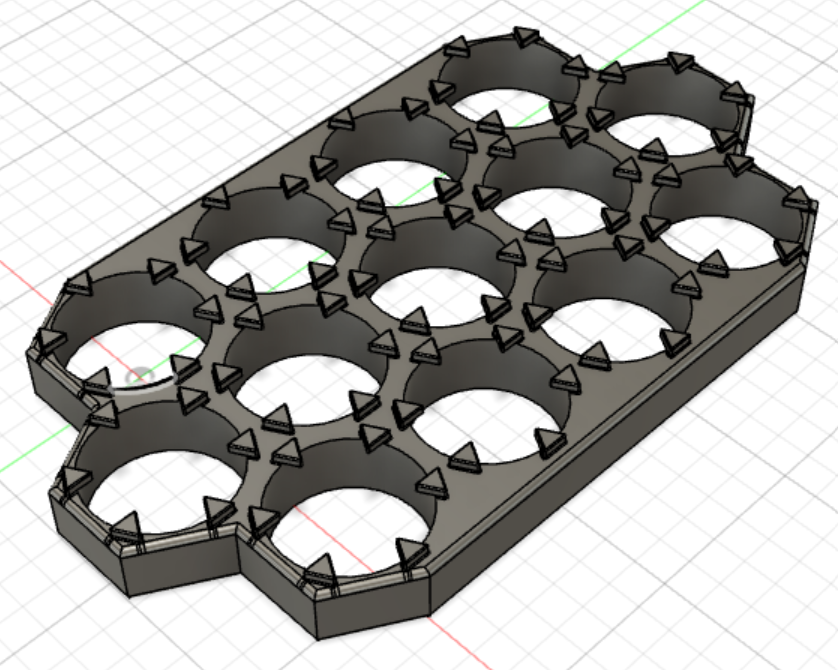
The pack consists of 13 Samsung 40T 21700 lithium-ion cells in series
achieving 187.2 Watt-hours of energy. The cells are packed hexagonally into a 3D-printed casing
which was modeled using Fusion360 and printed in PLA.
Art Gallery
Chinese Calligraphy
I began taking private Chinese Calligraphy lessons in the sixth grade
under a family friend. I started off with the print script (正楷) font to master the fundamentals, and
then later learned to express myself in cursive (行書) and artistic/imaginative (草書) character styles.
Here is some of my artwork below.
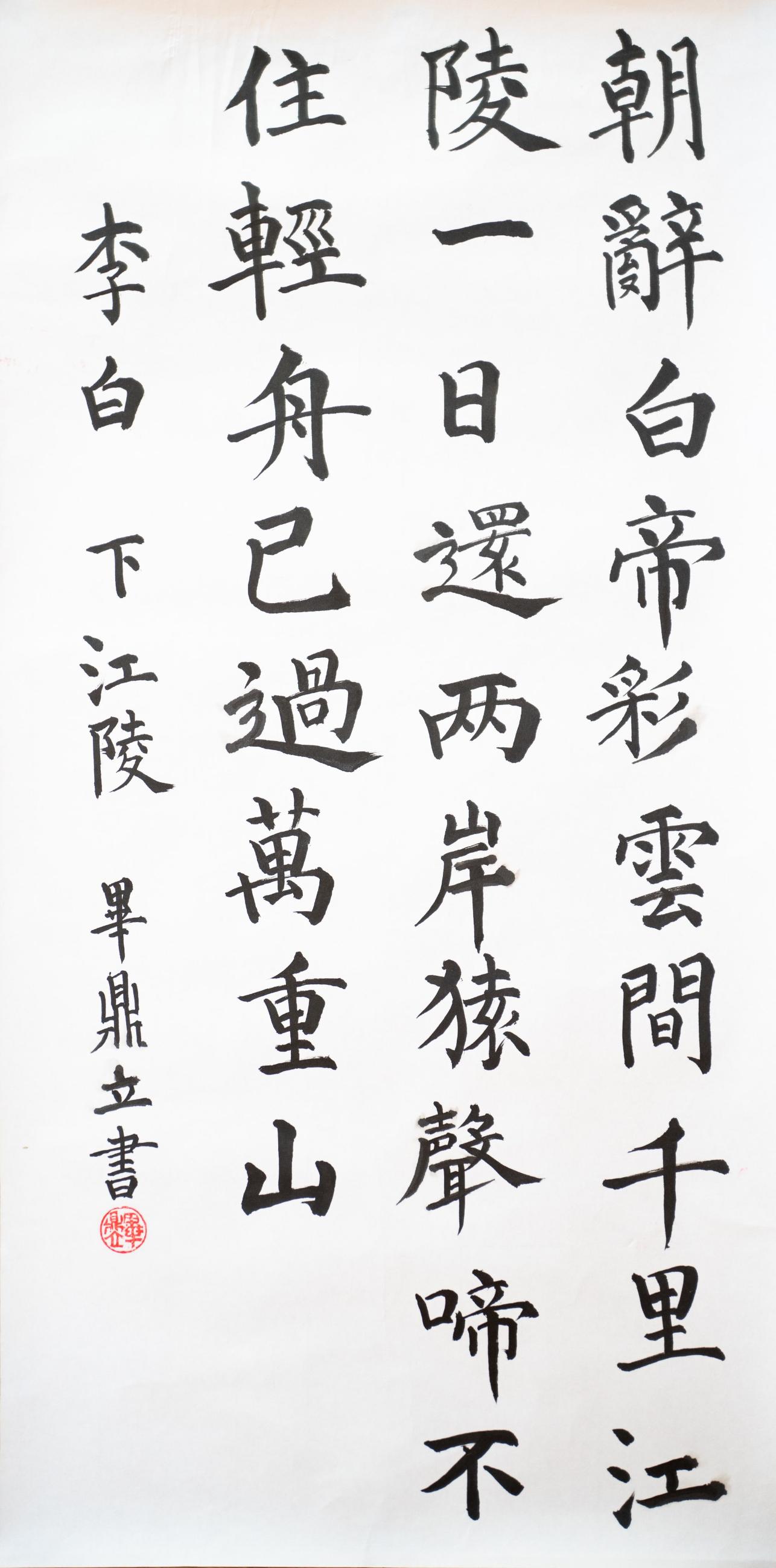
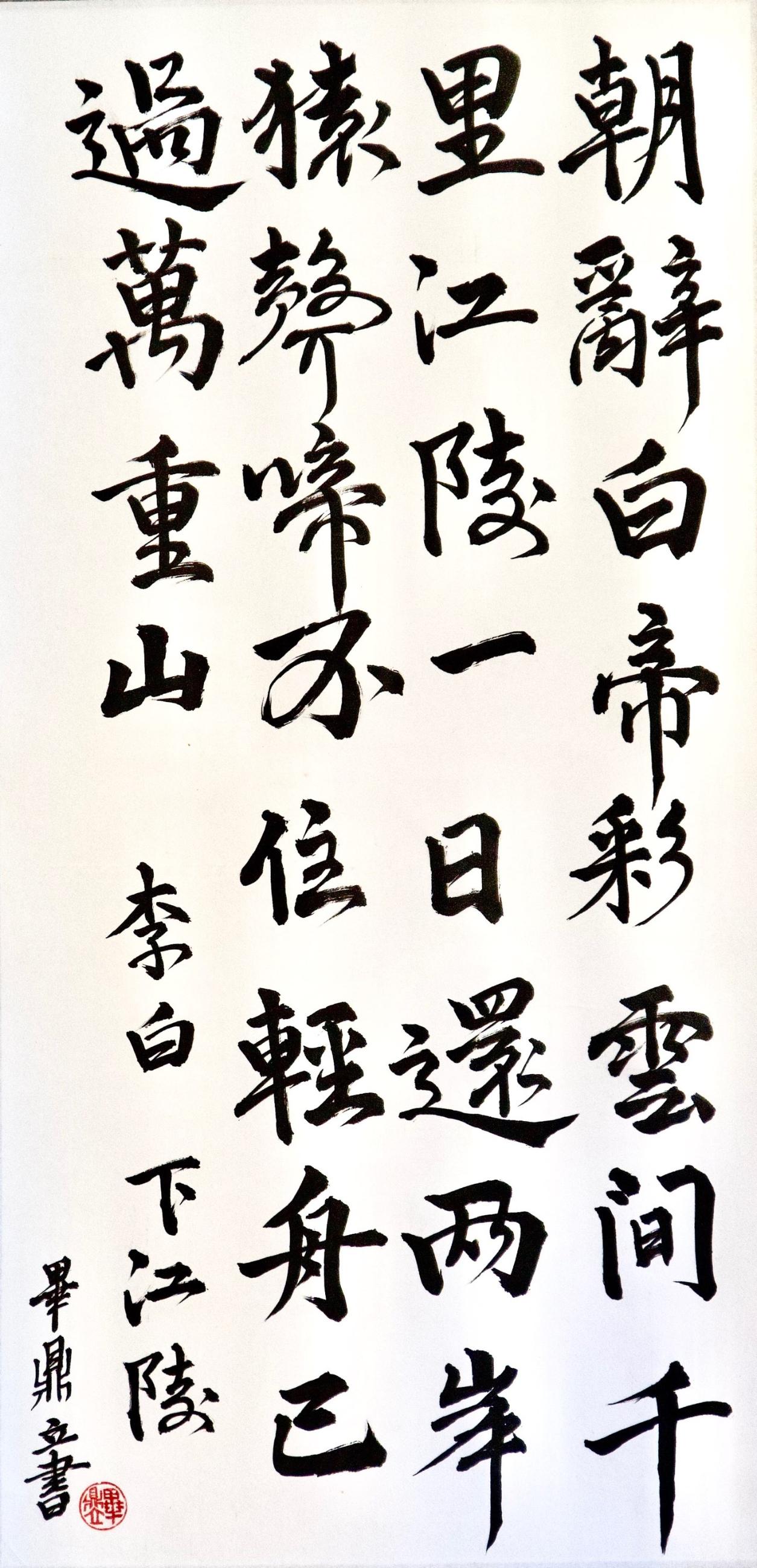
下江陵 Xia Jiangling - 李白 Li Bai
This iconic poem by Li Bai portrays his observations of nature on his way down the Yangtze River to
Baidi City. Li Bai experiences the hot and noisy jungle environment, which is reflected in the
faster brushstrokes of my cursive style piece.
On the left is my rendition of the poem in print script. Written when I was in junior high, the piece
demonstrates my technical skill with the brush and my fundamental knowledge of the different types
of calligraphy strokes.
On the right is the same poem revisited with a cursive style. Written in
high school, I wanted to add character and life to a piece I had written in monotone before.
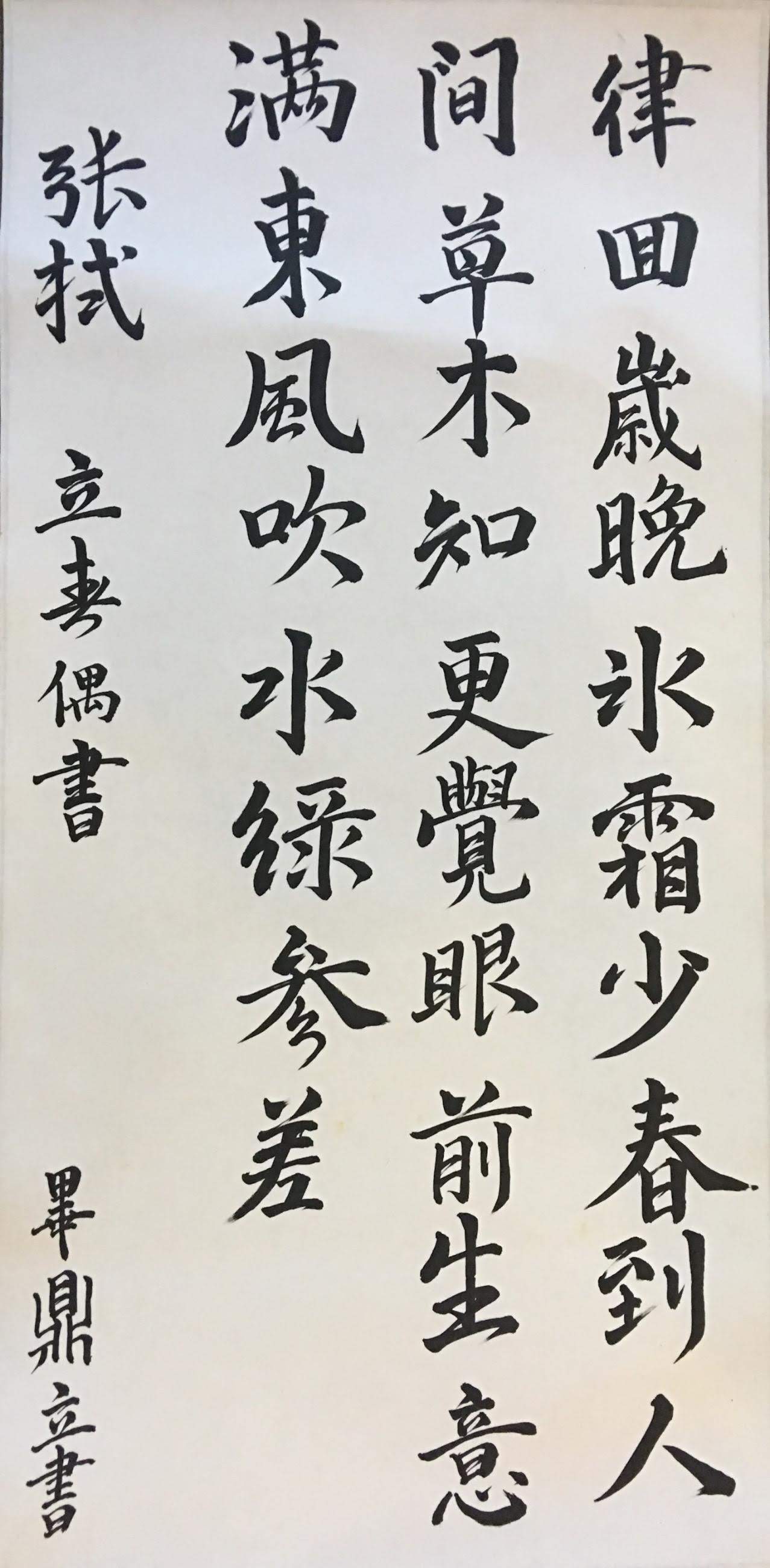
立春偶書 Li Chun Ou Shu - 張拭 Zhang Shi
This poem by Zhang Shi describes the rebirth of life that results from the
seasonal transition from winter to spring. I used a cursive style with more animated brush strokes
to symbolize the sweet youth of spring, as if the brush was dancing energetically.
Music
I dabbled with the piano by ear during elementary school, but began more
serious music training later in junior high. The year before high school I picked up violin and
joined the Homestead High School Orchestra the following year. I also played piano for the Homestead
Symphony Orchestra in my Junior and Senior years of high school.
Gershwin Prelude No. 3
Although the shortest piece in my Certificate of Merit Panel Audition
repertoire, Gershwin's third Prelude was a challenging piece because of its faster tempo
and contemporary style.
Schubert Impromptu Op.90 No.4
Schubert Impromptu Op.90 No.4 is one of the composer's most beloved
impromptus for its exercise on tone quality and dynamic range. Playing this piece demands even
tone quality and precise fingers.
Bach Fugue No.2 in C Minor
Bach's pieces are regarded as one of the most healthy ways to train hand
dexterity and independence. As my teacher tells me, Bach is about making it look easy even when it
makes you feel like a beginner again. It's like eating kale—palatable in controlled
quantities, but too
much and it feels like a kind of punishment.
Mozart Piano Sonata No. 5 in G Major
Mozart Sonatas are like vanilla ice cream: basic, sweet, and nothing like real vanilla. One must
channel
their inner snobbish, rich nobility to embody Mozart's music.
This is bold and this is strong. This is italic and this is
emphasized.
This is superscript text and this is subscript text.
This is underlined and this is code: for (;;) { ... }. Finally, this is a link.
Heading Level 2
Heading Level 3
Heading Level 4
Heading Level 5
Heading Level 6
Blockquote
Fringilla nisl. Donec accumsan interdum nisi, quis tincidunt felis sagittis eget tempus
euismod. Vestibulum ante ipsum primis in faucibus vestibulum. Blandit adipiscing eu felis
iaculis volutpat ac adipiscing accumsan faucibus. Vestibulum ante ipsum primis in faucibus lorem
ipsum dolor sit amet nullam adipiscing eu felis.
Preformatted
i = 0;
while (!deck.isInOrder()) {
print 'Iteration ' + i;
deck.shuffle();
i++;
}
print 'It took ' + i + ' iterations to sort the deck.';